库卡机器人 基础操作编程介绍
库卡机器人 基础操作编程介绍
机器人示教器基本参数和按钮功能

目录:
1、示教器图标S
2、示教器驱动装置I
3、机器人解释器R
4、机器人之操作模式
5、机器人之倍率操作
示教器图标S
一.关于S提交解释器:
1.库卡机器人中所谓的解释器,可以理解任务处理器(Task)或者线程(Thread),彼此独立但彼此之间可以交互数据;
2.机器人控制系统上平行执行着 2 个任务:
机器人解释器(Robot Interpreter): 运动程序通过机器人解释器执行。
提交解释器(Submit Interpreter):sub格式程序通过提交解释器执行。
-系统版本KSS8.2:只有机器人解释器和系统提交解释器;
-系统版本KSS8.3:未安装multisubmit选项时,只有机器人解释器和系统提交解释器;若有此选项后,会扩展额外7个提交解释器;
-系统版本KSS8.5:不仅有机器人解释器和系统提交解释器,还会自带扩展额外7个提交解释器;
3.提交解释器的作用:可执行对时间要求不严格的逻辑运算/数据处理/状态监控等;
4.默认情况下,不显示所选SUB 程序的过程。这可通过系统变量 $INTERPRETER(默认值为1,即显示机器人解释器)进行更改;

二.提交解释器状态

其实是通过监控$PRO_STATE0状态(这里仅针对单一提交解释器):
(1).#P_STOP:选定并启动的提交解释器被暂停;
(2).#P_FREE:提交解释器未选定;
(3).#P_RESET:选择了提交解释器,语句指针位于所选Sub程序首行;
(4).#P_ACTIVE:已选择SUB程序在运行;
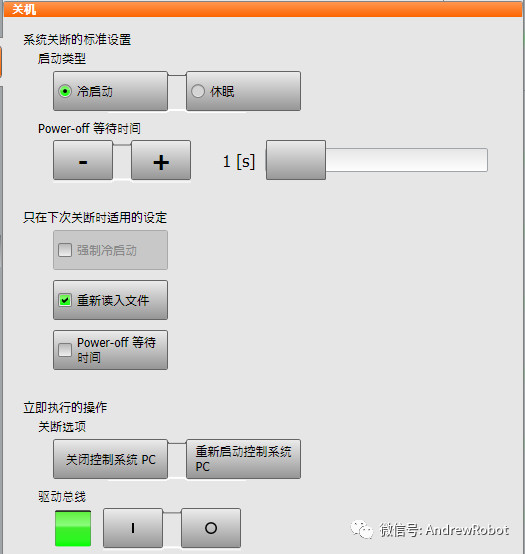
提交解释器在机器人控制系统接通时自动启动,此时启动程序 SPS.SUB,此处设置:
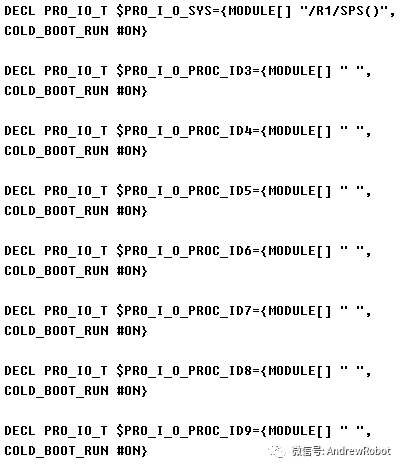
$PRO_I_O_SYS:设定机器人控制器冷启时需要启动的系统提交解释器程序;
$PRO_I_O_PROC_ID3-9:设定机器人控制器冷启时需要启动扩展的提交解释器程序;
注意:切勿更改$PRO_I_O_SYS设置,否则会造成可能造成机器人无法运行;
三.系统提交解释SPS.sub
SPS是德文PLC的缩写,如下图为SPS.sub程序:
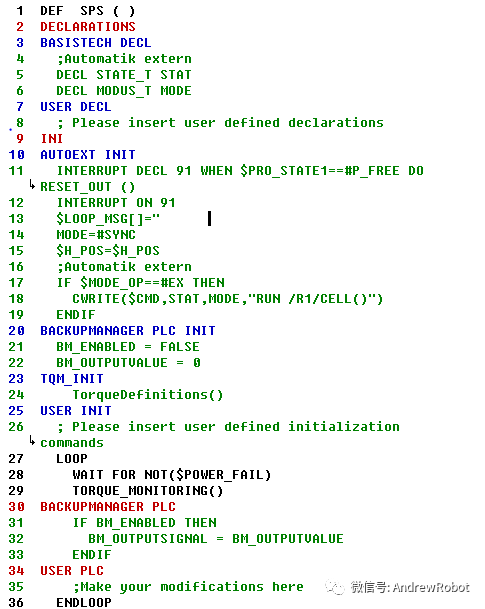
整个SPS.sub程序分为3部分:
(1) Declarations(变量定义)
(2)INI(初始化)
(3)LOOP(循环)
Declarations变量定义部分:
-BASISTECHDECL(基本Tech变量定义,如外部自动/软件包);
-USER DECL:用户变量定义区域;
INI初始化:
-AUTOEXT INIT:外部自动;
-BACKUPMANAGER PLC INIT:PLC 备份初始化;
-TQM_INIT:扭矩监控初始化;
-USER INIT:用户数据初始化;
LOOP循环:
-WAIT FOR NOT($POWER_FAIL):确认PC供电;
-TORQUE_MONITORING:扭矩监控;
-BACKUPMANAGER PLC:PLC备份机器人程序;
-USER PLC:用户定义的逻辑及数据处理;
警告提示:

示教器驱动装置I
一.驱动装置状态I
驱动装置有以下几种状态:

各图标及颜色所代表的意义:

提示:
(1).驱动装置接通不表示库卡伺服(KSP)进入受控状态并且给电机供电。
(2).驱动装置关断不表示库卡伺服包中断电机的供电。
(3).库卡伺服是否给电机供电取决于安全控制系统的驱动装置是否许可开通。
二.驱动装置之移动条件
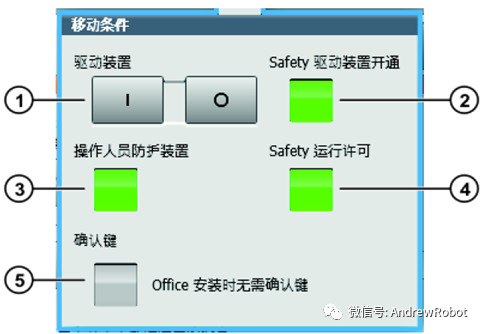

$USER_SAF为 TRUE 的条件取决于控制系统类型和运行模式:

三.与驱动装置相关的系统变量:

机器人解释器R
机器人解释器R, 其存在如下图这些状态:

这里以单一提交解释器为例,其是通过监控变量$PRO_STATE1状态:
1.#P_FREE:机器人程序未选定;
2.#P_RESET:语句指针位于所选程序首行;
3.#P_ACTIVE:机器人程序选定且在运行;
4.#P_STOP:选定并启动的程序被暂停;
5.#P_END:语句指针位于所选程序***后;
那么,有些好奇的老铁会问,如果是多提交解释的话,会不会也是这样?
其实多提交解释器是不一样的,这种情况下,$PRO_STATE1是不存在的,在进行接下来的内容,先引入Prog_info结构体:

说明:

多提交解释是通过变量$PROG_INFO[idx]来检测(idx对应$INTERPRETER),其实单提交解释器,也可以通过这检测R状态:

$PROG_INFO[1].P_STATE类似前面的$PRO_STATE1.
机器人之操作模式
一.概要:
库卡通常情况下有四种操作模式,且不同模式的用途及速度情况如下图:

此外,当某种模式被选择后,在示教器上会有一个专门显示,例如,当机器人控制器被选为T1模式:

二.与其相关的系统变量:
1. $MODE_OP=Operating mode

2.系统变量:$T1/$T2/$AUT/$EXT
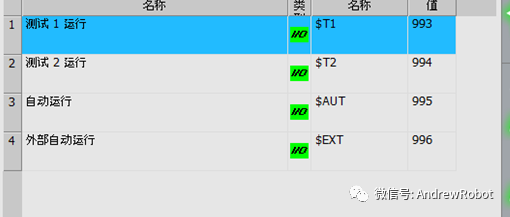
另外可以通过变量显示监测状态:
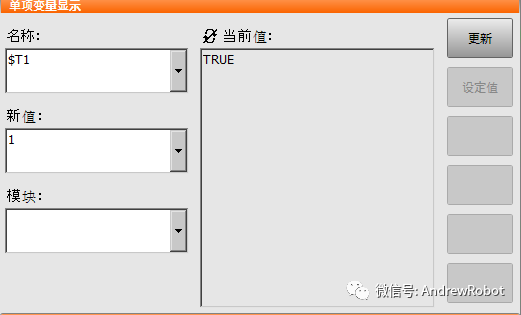
三.如何禁用T2模式:
T2模式其实可以通过设置C:\KRC\Roboter\config\system\common路径下的cabctrl.xml文件进行设置,它不在备份文件里,也不可以通过WV软件进行修改并
下载进去.具体操作步骤:
在示教器里,登陆***权限;
此路径C:\KRC\Roboter\config\system\common找到cabctrl.xml文件;
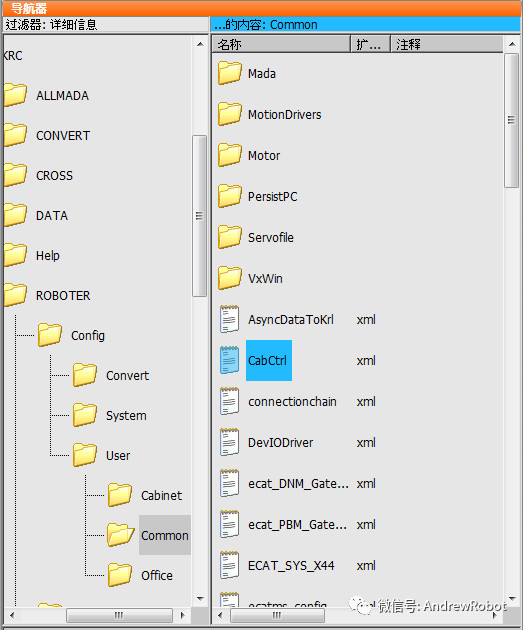
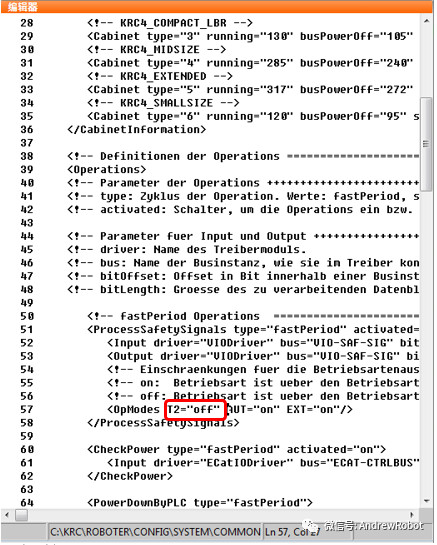
打开文件xml元素OpModes,将T2由on改为off:
4.保存修改的文件,选择确认:
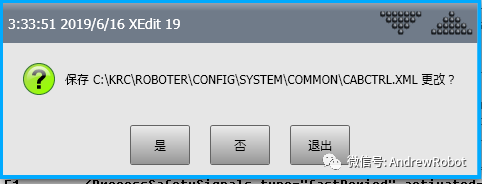
5.冷启动并加载文件的方式来重新启动系统:
***后看实际效果,T2模式不见了

但是,不建议大家这么去做,因为T2模式在调试中还是有用的。
机器人之倍率操作
一.基础
接触过库卡机器人示教器的老铁应该知道,库卡机器人有两种可以调节的倍率:
程序倍率,简称POV;
手动倍率,简称HOV;
操作方式也有两种:
1.通过触摸屏调节:
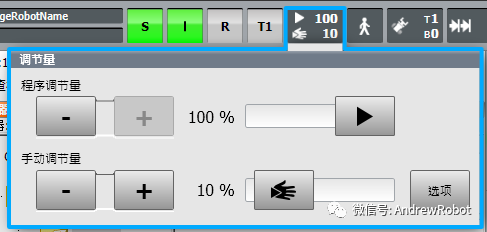
通过 +/- 或者拖拉滑条来调节其大小;
2.通过物理按键来调节:

通过 +/- 按键来调节其大小
二.系统变量
关于倍率,机器人系统都有相应的系统变量对应:

当在机器人示教器上操作时,
(1)手动调节量改变的是:$OV_JOG;
(2)程序调节量改变的是:$OV_PRO;
三.调节增量设置:
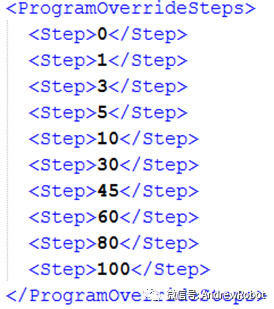
默认的情况下,倍率增量:0/1/3/5/../75/100:

如果觉得默认的配置不好,可以通过修改来实现:
具体修改路径:进去机器人控制器windows系统:C:\KRC\USER,打开文件:SmartHMI.User.config,在里面找到ProgramOverrideStep进行修改;
在里面找到JogOverrideStep进行修改;
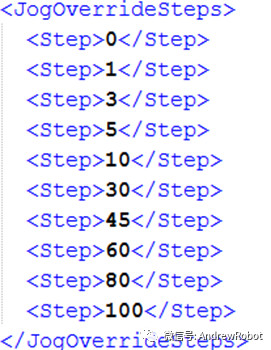
修改完成后,记得关机冷启动来刷新。
大家可以自己动手试一试!